 手機版
手機版 化工儀器網手機版
化工儀器網手機版
 化工儀器網小程序
化工儀器網小程序
 官方微信
官方微信 公眾號:chem17
公眾號:chem17
 掃碼關注視頻號
掃碼關注視頻號





讓手術機器人“無線”靈動,清華深研院研發無纜磁驅動執行器
無纜磁驅動執行器因其可遠程操控、結構小型化和環境適應性強等特點,在微創診療中展現出廣闊前景,可服務于靶向藥物輸送、遠程介入操作和體內檢測等應用。然而,在該領域中,如何在保證控制方式簡潔可靠的同時賦予執行器多樣化功能,仍是一項亟待突破的關鍵問題。面對復雜且高度非結構化的生物環境,微型機器人需要根據任務需求在不同運動模式與操作形態之間靈活切換。現有磁驅機器人通常存在性能取舍問題:剛性磁性執行器能夠在簡單磁場作用下實現較穩定、可預測的運動,并具有較好的結構強度,但其固定構型限制了多模態操作能力;軟體磁性執行器雖可通過連續變形獲得復雜形態變化,機械承載能力卻隨之下降,高自由度特性也大幅提升了建模與控制難度。
圍繞上述矛盾,清華大學深圳國際研究生院先進制造領域生物制造工程實驗室彌勝利教授團隊提出了一種新的鉸接式模塊化設計思路,該研究以“Articulated Untethered Magnetic Actuators for Multimodal and Cross-Scale Operations”為題,發表在國際期刊《Cyborg and Bionic Systems》上。該方法以離散剛性模塊為基本單元,并通過旋轉關節進行連接,使系統在保持剛性結構可預測性和機械魯棒性的同時,獲得類似軟體機器人的可重構能力。通過引入有限且可設計的自由度,執行器能夠實現更豐富的姿態調節和任務相關形變,從而為多功能磁驅機器人設計提供了新的解決方案。

該設計的另一項重要特點是,其運動產生與模式切換均可在單一均勻磁場下完成。換言之,系統不依賴復雜空間梯度磁場即可實現多種操作行為,從而降低了磁場生成與控制系統的復雜度,也提升了平臺在實際應用場景中的可實現性(圖1)。

圖1. 鉸接式磁性執行器的模塊化構型與磁場驅動機制。
在該設計框架基礎上,研究團隊利用摩方精密面投影微立體光刻(PμSL)技術(microArch® S230,精度:2μm )制備了四類代表性鉸接式磁驅執行器(圖2),包括磁性螳螂(MM)、磁性鵜鶘(MP)、磁性鑷子(MT)和磁性夾子(MC)。
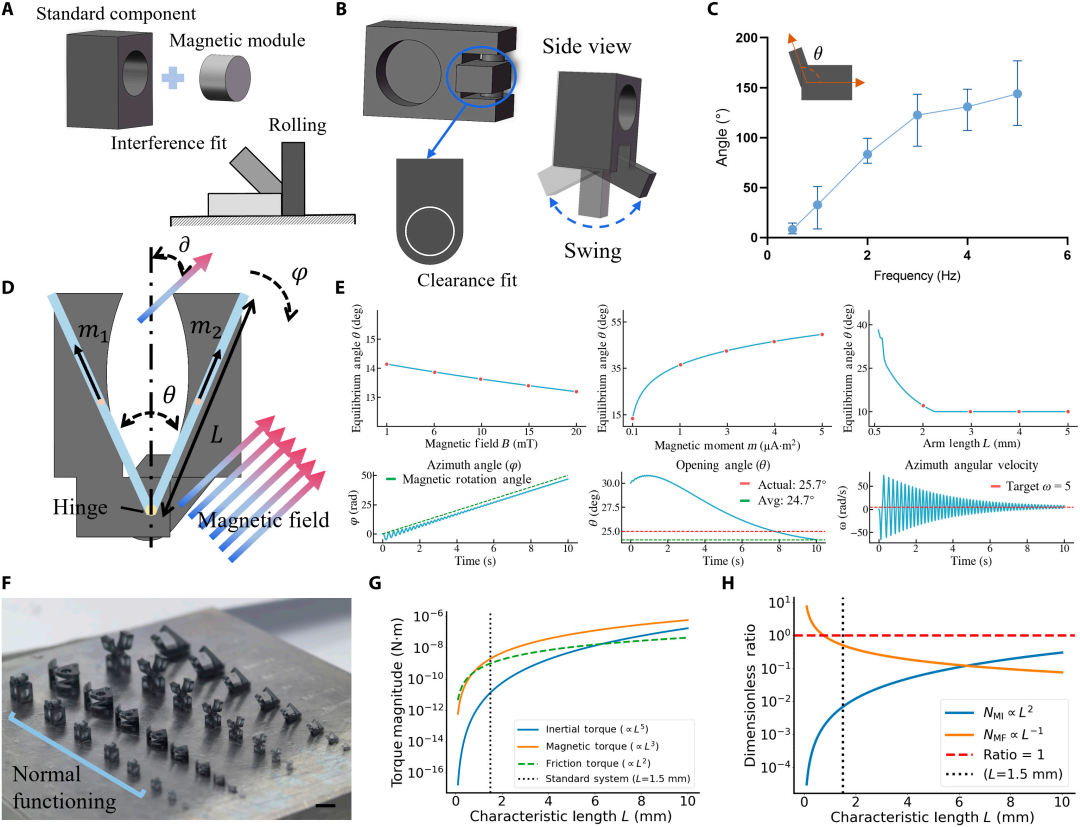
圖2. 鉸接式運動機制的分析與建模。
在多模態與跨尺度操作驗證中(圖3),這些執行器能夠實現爬行、滾動等不同運動方式,并可根據任務需求切換模式,完成貨物運輸、液體攪拌與目標釋放等功能。為評估該機制的可靠性與可推廣性,研究團隊建立了相應的數學模型并開展仿真分析,同時借助無量綱分析驗證該設計從毫米級到亞毫米級尺度應用的可行性。
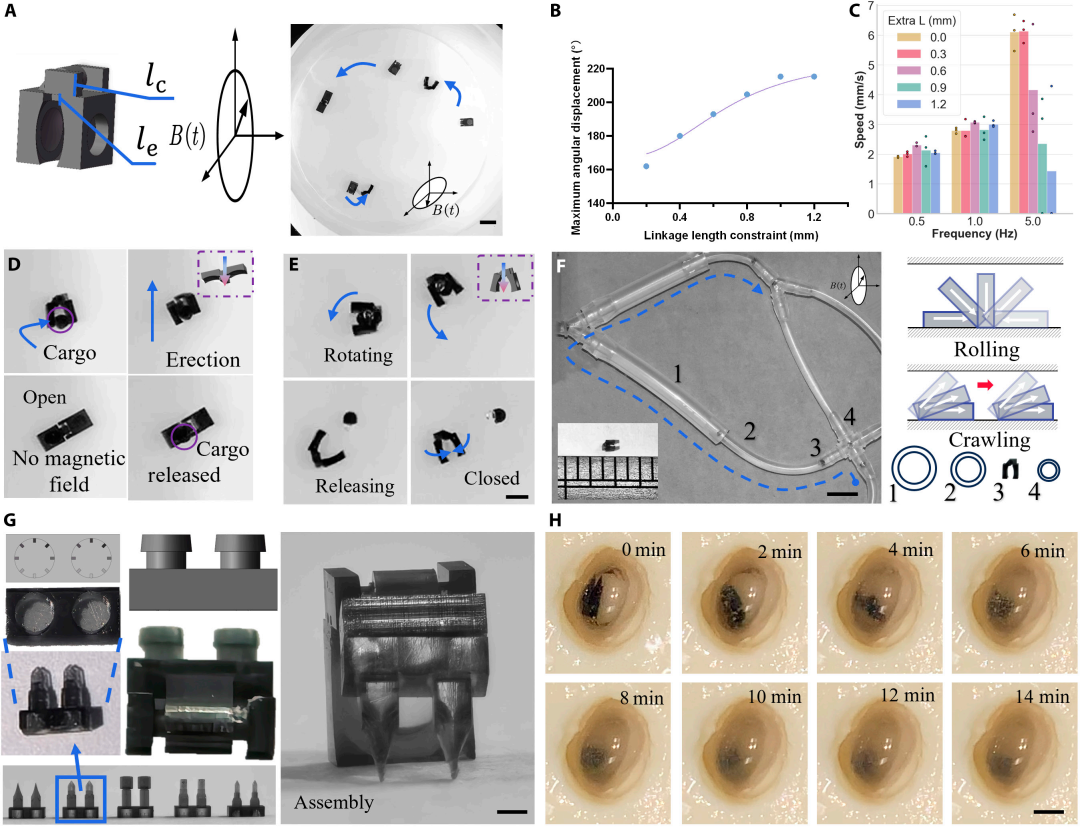
圖3. 磁驅微鑷的跨尺度功能驗證與模塊化裝配展示。
實驗結果表明,該系列機器人具有良好的任務適應能力,可在不同場景中獨立完成相應功能操作。面向復雜生物環境,該平臺在驗證過程中表現出較高的靈活性與操作精度(圖4):一方面,微型機器人能夠在微尺度、高彎曲度的血管模型中實現靈活導航;另一方面,在宏觀尺度的離體豬胃模型中,機器人能夠克服真實生理結構帶來的障礙,并將目標貨物準確遞送至指定位置。

圖4. 磁驅螳螂與磁驅鵜鶘的結構設計及功能演示。
此外,研究還展示了該平臺的多階段邏輯控制能力。以磁性夾子(MC)為例,研究團隊通過預設內部磁化分布,使執行器在同一均勻外磁場作用下即可依次完成多個操作階段,并根據特定狀態實現類似邏輯判定的功能響應(圖5)。
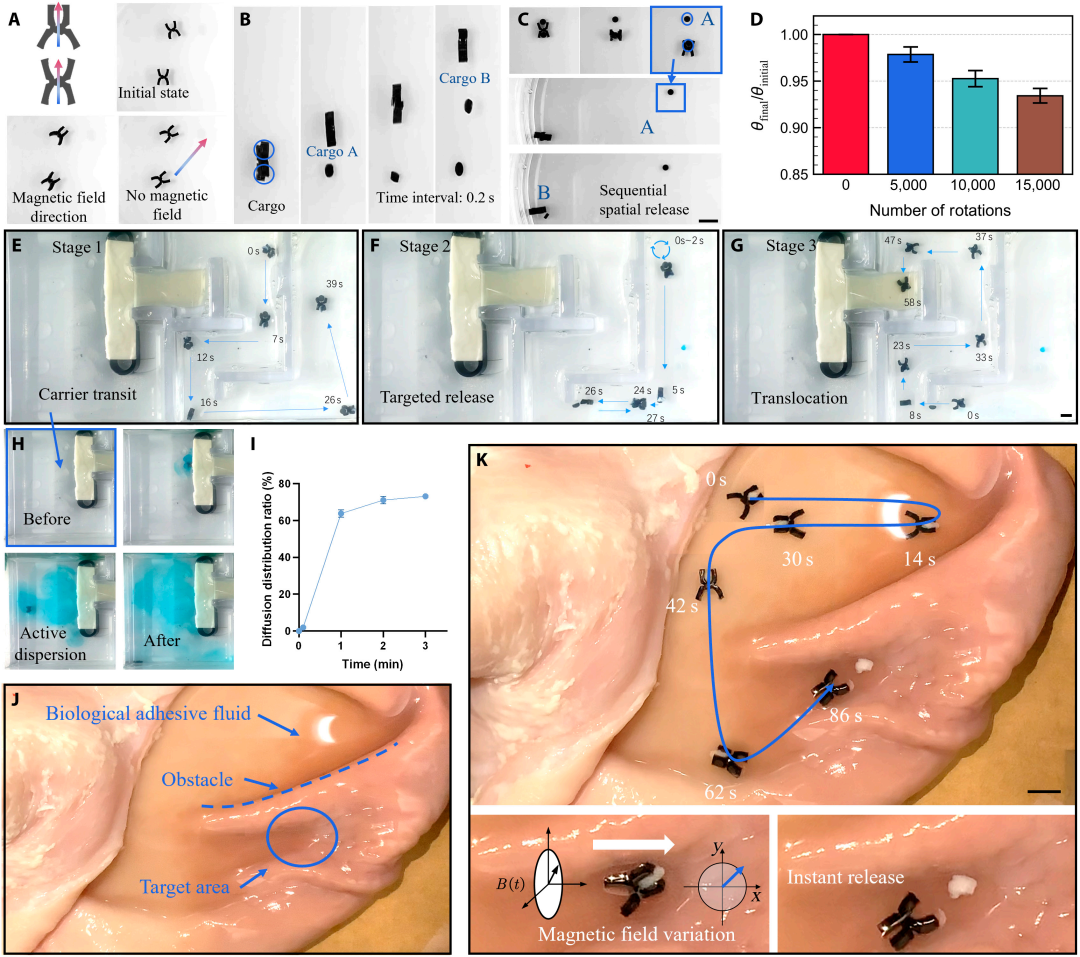
圖5. 磁性執行器在復雜迷宮模型與離體豬胃環境中的靶向遞送驗證。
總結:該研究構建了一套兼具易控性、可擴展性與多功能性的磁性機器人設計框架,為面向復雜生物環境的高精度醫療操作提供了新的技術基礎。
相關產品



免責聲明
- 凡本網注明“來源:化工儀器網”的所有作品,均為浙江興旺寶明通網絡有限公司-化工儀器網合法擁有版權或有權使用的作品,未經本網授權不得轉載、摘編或利用其它方式使用上述作品。已經本網授權使用作品的,應在授權范圍內使用,并注明“來源:化工儀器網”。違反上述聲明者,本網將追究其相關法律責任。
- 本網轉載并注明自其他來源(非化工儀器網)的作品,目的在于傳遞更多信息,并不代表本網贊同其觀點和對其真實性負責,不承擔此類作品侵權行為的直接責任及連帶責任。其他媒體、網站或個人從本網轉載時,必須保留本網注明的作品第一來源,并自負版權等法律責任。
- 如涉及作品內容、版權等問題,請在作品發表之日起一周內與本網聯系,否則視為放棄相關權利。


 采購中心
采購中心